A zero-shot, embodiment-aware traversability framework using multimodal LLMs for navigation costmaps. Visuosemantic caching cuts VLM queries 85.7%, with a 10% higher goal-reaching rate and 33% fewer constraint violations than SOTA VLA baselines on a quadruped.

Aditya Potnis
Robotics · MS CS @ UIUC
I work on enabling robots to act in unstructured environments with foundation models.
I'm a student at UIUC pursuing a MS in Computer Science. I'm advised by Prof. Girish Chowdhary at Distributed Autonomous Systems Lab. My research is supported by NASA FireSense, AIFARMS, I-FARM, COALESCE, and NSF ACCESS.
Previously at Earthsense, I developed hardware, autonomy and low-level control with torque vectoring for the 750kg TerraMax UGV's dual-ackermann steering and driving controllers for the 200+ TerraPreta and TerraSentia field robots.
I enjoy running and cycling, currently preparing for a 5k in 25 minutes. I also like to doodle and design things.

Research
I work on robots that generalize across embodiments and environments, reasoning over long horizons to plan and execute loco-manipulation tasks in unstructured indoor and outdoor terrain.
Key Areas
- Cross-Embodiment Generalization
- Embodiment Reasoning and Long-Horizon Planning
- Language-Conditioned Manipulation
- Loco-Manipulation for Indoor and Outdoor Environments
News
- Jun 2026"Visual-Language-Guided Task Planning for Horticultural Robots" accepted to Computers and Electronics in Agriculture.
- May 2025Joined Woven by Toyota as a Motion Planning Intern.
- Apr 2024Admitted to UIUC's MS in Computer Science with funding.
- May 2023Received and declined an admit from CMU's MRSD program.
- Jun 2022Won the Best Project Award in Mechanical Engineering at COEP; filed a patent.
- 2015–2018Represented India at WRO and FLL robotics internationals (New Delhi, Costa Rica, Spain, Estonia).
Education
University of Illinois Urbana-Champaign MS in Computer Science
Coursework: Humanoid Robotics, Autonomous Vehicle System Engineering, 3D Vision, Networked IoT, Software Engineering, Artificial Intelligence.
College of Engineering, Pune B.Tech in Mechanical Engineering, Minor in Computer Engineering
Coursework: Machine Design, Robotics and Automation, Mechanics of Materials, Engineering Mechanics, Linear Algebra, Vector Calculus.
Publications
CATNAV: Cached Vision-Language Traversability for Efficient Zero-Shot Robot Navigation
CTS-MoE: Implicit Policy Adaptation Enables Perceptive Locomotion on Discontinuous Terrain
A concurrent teacher–student, mixture-of-experts architecture enabling implicit policy adaptation for perceptive locomotion on discontinuous terrain.
Visual-Language-Guided Task Planning for Horticultural Robots
A modular, VLM-guided framework that interleaves natural-language queries with action primitives for autonomous crop monitoring. Benchmarking MLLMs on long-horizon planning, it matches humans on short-horizon tasks but degrades on long-horizon ones with noisy semantic maps.
Competitive Robotics

I'm a FIRST and WRO alumnus who has competed in robotics since 2013 and represented India internationally three times. I've mentored a team to Runner-up Best Project Research at the 2018 FLL European Opens in Estonia, and continue to mentor FLL, FTC and Vex teams at Robominds.
Achievements
- 2018 FLL European Championships, Tallinn (coach) — 2nd Best Project Research, 4th Robot Game
- WRO Internationals 2017, Costa Rica
- WRO Internationals 2016, New Delhi — Gold, 2016 Nationals
- FLL Open European Championships 2016, Spain — Top 10
Projects
Navigation & Perception
Visual Navigation Policy with V-JEPA2 and Diffusion Policy
Visual Navigation Policy with V-JEPA2 and Diffusion Policy
Trained a visual navigation policy using a frozen V-JEPA2 backbone for spatiotemporal feature extraction from egocentric video, with a Diffusion Policy action head for action prediction.
Adapt: Diffusion-Predicted Pedestrian Avoidance with MPPI Control on the Polaris GEM e4 (CS 588)
Adapt: Diffusion-Predicted Pedestrian Avoidance with MPPI Control on the Polaris GEM e4 (CS 588)
Autonomous driving stack on the Polaris GEM e4 that pairs a diffusion-based pedestrian predictor with an MPPI planner for pedestrian-aware avoidance, plus a text-promptable LiDAR-camera module for open-vocabulary goals.
TOPReward on Ego4D – Token-Probability Rewards for Egocentric Video
TOPReward on Ego4D – Token-Probability Rewards for Egocentric Video
Re-implementation of TOPReward (token-probability zero-shot rewards) benchmarking VLMs (Qwen3-VL, Molmo2) on whether egocentric Ego4D clips match their narration, with per-prefix progress curves and a VOC (Spearman) metric.
Hardware, Simulation & Tooling
Design and Analysis of Tendon actuated Robotic arm using Bowden cables and Mechanical Multiplexing (Thesis @ COEP)
Design and Analysis of Tendon actuated Robotic arm using Bowden cables and Mechanical Multiplexing (Thesis @ COEP)
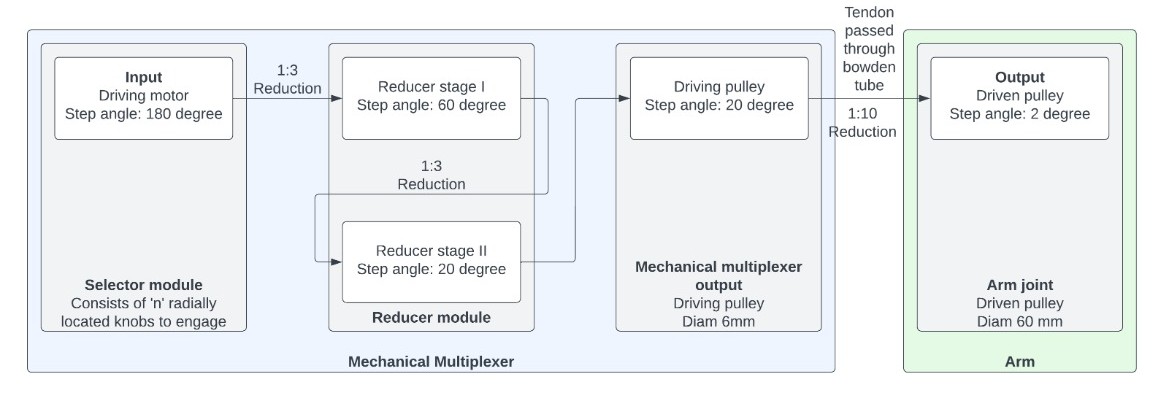
Designed a modular 4-DOF Bowden cable-driven tendon-actuated robot arm with a mechanical multiplexer enabling full control with only 2 stepper motors, prototyped with FDM printing and including FK/IK solvers. Awarded Best Working Project (Mechanical) at COEP; provisional patent filed (IN202321006687).
Salto Simulator for development
Salto Simulator for development
Gazebo plugin simulating Salto-1P jumping motion as a point object, supporting parabolic trajectory jumping and simulated odometry/pose estimation to accelerate autonomy development.
Generative Models
Low-Rank Adaptation for Video Generation with semantic relative pose prompts (CS 598 3D Vision, HACKER Project)
Low-Rank Adaptation for Video Generation with semantic relative pose prompts (CS 598 3D Vision, HACKER Project)
Fine-tuned Wan 2.2 (1.3B) with LoRA to generate robot-POV navigation videos from text and motion plans for scalable outdoor data synthesis. Evaluated motion fidelity and failure modes, proposing hierarchical motion-primitive curriculum training to improve alignment.

GhibliDream – Studio-Ghibli inspired Stylization of Stable Diffusion (CS 444)
GhibliDream – Studio-Ghibli inspired Stylization of Stable Diffusion (CS 444)
Fine-tuned StableDiffusion-2.0 with DreamBooth on curated Ghibli images using LLM-assisted auto-captioning, achieving 0.90+ CLIP-I cosine similarity on foreground characters while retaining background quality.
More Projects

Semantic-aware segmentation and navigation using CLIPSeg (CS440)
Semantic-aware segmentation and navigation using CLIPSeg (CS440)
Combined CLIPSeg with Depth-Anything V2 for obstacle-aware gridmap generation (94% accuracy); modified A* planner with goal-object validation achieves 81% success rate for line-of-sight pathfinding.
ROS1 ROS2 bridge for faster debugging and code refactoring
ROS1 ROS2 bridge for faster debugging and code refactoring
Created a Docker image generation repo to accelerate image creation and facilitate easier refactoring.
Design inspired by Vardhan's website.